This post will describe how to get Macchina talking with SPI shields, including Ethernet shields.
But first some Background:
When the Arduino Mega was introduced, for some reason, the SPI lines where in a different physical location than the Arduino UNO. This meant that several SPI-dependant shields were not compatible with both the Mega and the UNO without using some jumper wires.
MEGA SPI: 50 (MISO), 51 (MOSI), 52 (SCK), 53 (SS).
UNO SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK).
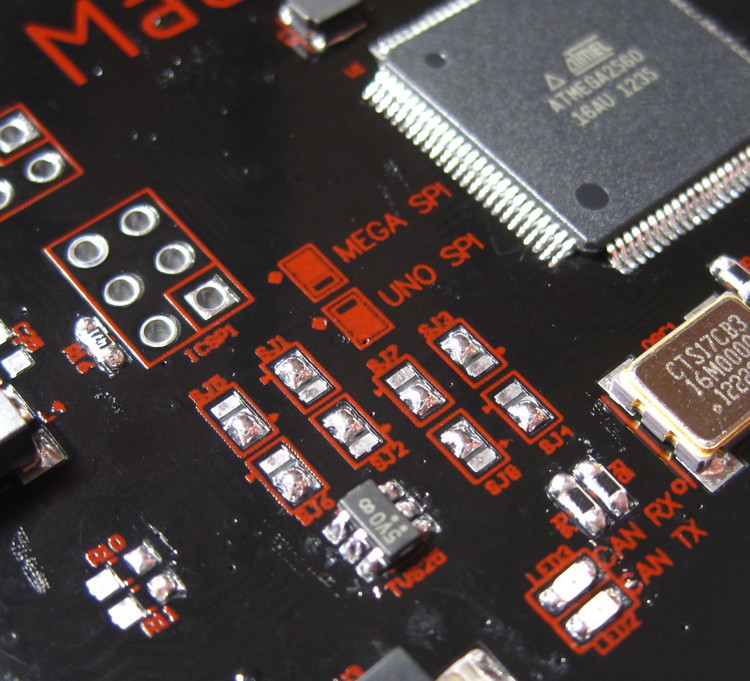
Our solution to get around this, and allow for more compatibility between the Macchina and shields, was to add some solder-jumpers to the Macchina board. Now one can easily swap the SPI lines depending on what sort of shield is attached.
Flash forward a few years and the SPI pins have not moved, BUT it seems as though the official solution to this was to use a down-ward facing 2X3 ICSP header to make connection to SPI pins on ALL Arduino boards.
While laying out Macchina, we moved the ISCP header to make room for all the extra automotive interface stuff. This alone would not be an issue, except for the fact that some new shields (the Arduino Ethernet Shield for example) ONLY has these SPI pins on the down-ward facing ISCP header and no where else. This is an issue, a known issue.
Work-arounds are as follows:
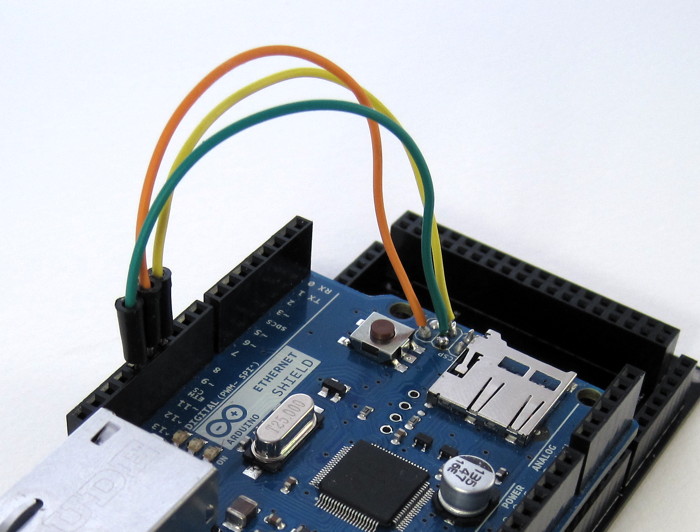
1. If using the Official Ethernet shield: Need to add jumper wires to make correct connections. There are many ways to accomplish this including this solution that connects wires from the ICSP header to the side headers. Some soldering required.
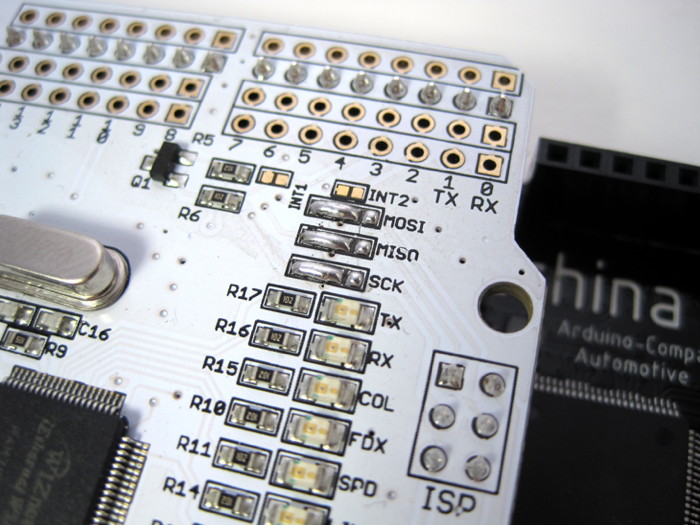
2. Is using SEEEDSTUDIO's Ethernet Shield: Need to re-route the SPI lines by using the easier-to-do-than-soldering-wires method shown here:
Side note: Both of these boards are sold at Radioshack (!?) for about $32.
3. If using the Sparkfun-branded Ethernet Shield: No modifications necessary since wires are going directly to the SPI pins on the side headers.
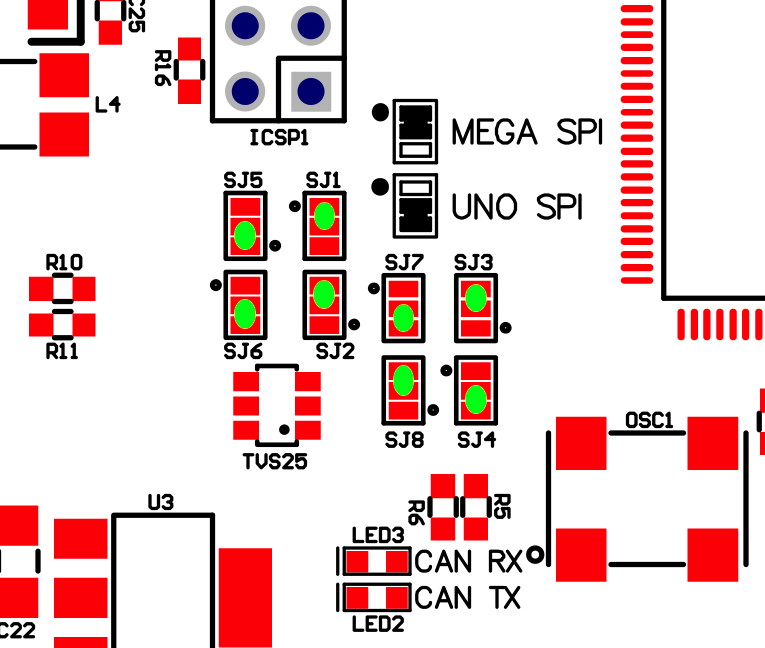
Regardless of which of these shields are used, the solder jumpers on the Macchina must be set as follows:
Once hardware modifications are done, plug the shield into the Macchina and get coding!
A good first test would be to try out is the built-in example called "WebServer" that comes with the standard Arduino IDE.
Lastly, a note regarding SPI:
The CAN interface also uses SPI to communicate with the microcontroller. While the hardware is set up correctly (SS (chip select) for the CAN controller is connected to a un-used pin on microcontroller, special care must be taken with the code to ensure communication between Ethernet Microcontroller and CANBUS Microcontroller is handled correctly.
Comments
Submitted by SethAronson on Thu, 03/01/2018 - 02:00 Permalink
It is very fast internet than
It is very fast internet than a local internet we can search anything very fast and easily on using Ethernet. Moreover essayvikings review tells the benefits of Ethernet internet.
Submitted by sayaerwin on Wed, 11/04/2020 - 05:08 Permalink
<a href="https://about.me
Nice machines. https://about.me/downloadwallpaperhd
Submitted by sayaerwin on Thu, 07/29/2021 - 08:04 Permalink
Good Machine.galeri wallpaper
Good Machine. galeri wallpaper
Submitted by KristinaMccoy on Wed, 10/13/2021 - 17:30 Permalink
Your work here is
Your work here is extraordinary, and the composing is fabulous. The substance praises the composing style. Next time you distribute an article here, could you ensure it has some data about friendly plans? I would be appreciative. Best Social Plan
Submitted by KristinaMccoy on Thu, 10/06/2022 - 16:43 Permalink
I appreciate the writer for
I appreciate the writer for sharing fabulous content here. With the content shared here, I can finish my paper and submit it. This paper has been long overdue and it will finally be complete. vyvanse online
Submitted by KristinaMccoy on Sun, 12/18/2022 - 04:42 Permalink
I should say I'm dazzled with
I should say I'm dazzled with the nature of work displayed here! Could it be feasible to share some data abbut the best homes soon? I figure I could involve that data in one of my new tasks. Sceneca Residence Condo
Submitted by KristinaMccoy on Mon, 02/06/2023 - 06:36 Permalink
I am impressed with the
I am impressed with the quality of this article. You've shared some top-tier information here, and that's something I've not seen other people do. You have made my day by sharing this! Keep up the fantastic work! TMW Maxwell Price
Submitted by KristinaMccoy on Wed, 03/29/2023 - 07:07 Permalink
The writing in this article
The writing in this article is top-notch - it's engaging, informative, and easy to read. I found myself hooked from the first sentence and couldn't stop reading until the end. Grand Dunman Showflat
Submitted by KristinaMccoy on Thu, 03/30/2023 - 14:00 Permalink
Thank you for sharing your
Thank you for sharing your personal experiences and insights in this article. Your anecdotes and observations add a unique and valuable perspective that really brings the topic to life. Lakegarden Residences Price
Submitted by KristinaMccoy on Sat, 05/13/2023 - 13:12 Permalink
It's evident that you have a
It's evident that you have a knack for storytelling. The way you weave narratives and anecdotes throughout your article adds depth and brings the content to life. The Myst Condo Showflat
Submitted by surroundrevolving on Thu, 09/28/2023 - 01:51 Permalink
Let your mind run wild and on
Let your mind run wild and on a trip of a lifetime, one that will blow your mind and change your life forever. Immerse yourself in the hypnotic world of gaming, where incredible friendships are formed and infinite knowledge is effortlessly obtained, and prepare to be enchanted. fireboy and watergirl
Submitted by alomax on Wed, 10/12/2022 - 19:36 Permalink
Prices offered by our website
Great Information sharing .. I am very happy to read this article .. thanks for giving us go through info.Fantastic nice. I appreciate this post.csgo accounts andbuy call of duty accounts and8 ball pool accounts andvalorant accounts andfortnite accounts for sale andbuy forza 5 accounts andbuy rust accounts
Submitted by daisymaria on Mon, 11/06/2023 - 22:26 Permalink
You'll need to write <a href=
You'll need to write Uno Online or modify software code that runs on the Macchina to communicate with the SPI shield. The specifics of this code will depend on your project's requirements and the type of shield you're using (e.g., Ethernet).
Submitted by umrahapp on Thu, 10/29/2020 - 07:15 Permalink
Namun, travel umroh tidak
Namun, travel umroh tidak perlu mencantumkan tanggal berangkat dan harga paket umroh. Kepastian keberangkatan umroh masih menunggu ...Arab Saudi Kembali Buka Masjidil Haram, Ini Cara Siapkan http://lamahutravel.com/Calon jemaah umroh bisa membuat rencana berdasarkan harga paket yang berlaku untuk menjadi target atau tujuan umroh. Namun, rencana di https://umrahnesia.com/atau “Mbak berapa biaya umrah untuk 5 orang?” Kapan Umrah ... Saat ini sudah banyak metode pembiayaan paket umroh. Salah satunya ...531 Perusahaan Umroh Arab Saudi Bersiap Sambut Jemaah ...Rencana tabungan yang ada di Bareksa Umroh juga tidak mengikat dengan harga paket, jangka waktu juga tidak mengikat karena kita bisa ...Kinerja Tetap Kinclong Saat Pandemi, Begini Simulasi ...Salah satu rencana yang tersedia di Bareksa Umroh, adalah Paket Umroh Barokah dengan estimasi biaya Rp23,5 juta. Dengan asumsi kita ...Umroh Tahap I Sukses Tanpa Kasus Covid-19, Ayo Siapkan ...Rencana tabungan yang ada di Bareksa Umroh juga tidak mengikat dengan harga paket, jangka waktu juga tidak mengikat karena kita bisa ...Jemaah RI Diyakini Bisa Umroh 1 November, RI Tidak ... http://redhoillahiwisata.com/Namun Firman belum tahu berapa persen kenaikan biaya umroh. ... perjalanan umroh terkadang menawarkan paket perjalanan umroh plus ...8 Layanan Wisata Virtual, Tinggal Rebahan Bisa Keliling Dunia https://www.nasrotulummah.com/Ya, saat ini banyak tempat wisata dan travel agent yang mengusung ... menyediakan paket Umroh Virtual tanpa dipungut biaya sepeserpun.Jelang Libur Panjang, PLN Ingatkan Pelanggan Lunasi http://denatourumroh.com/Hal ini untuk menghindari sanksi berupa biaya keterlambatan dan ... utama 3 Paket Umroh, 3 Motor Listrik, dan puluhan hadiah lainnya.Rincian Biaya Umroh Terbaru 2019 dari Perusahaan Travel ... http://umrohalhabsyi.com/Berikut rincian biaya umroh terbaru 2019 dari Daqu travel. 1. Umroh Reguler Riyadoh. Harga Double Rp. 25.750.000. Harga Triple Rp. 24.750. https://www.daftarhajiumroh.com/category/biaya-umroh/
Submitted by Dharma on Tue, 01/26/2021 - 00:42 Permalink
Bagi yang mau dapat informasi
Bagi yang mau dapat informasi seputar <a href="https://tresna.me">Bisnis</a> dan juga <a href="https://www.tresna.me/2019/10/kerja-online.html">kerja online</a> bisa kunjungi blog saya temean teman ada banyak sekali artike menarik yang bisa memberikan inspirasi seperti <a href="https://www.tresna.me/2018/01/jualan-yang-menguntungkan.html">Jualan yang menguntungkan</a> dan <a href="https://www.tresna.me/2018/03/10-jenis-usaha-kuliner-yang-paling-laku.html">Usaha kuliner</a>
Submitted by ZoneZone on Wed, 03/03/2021 - 05:58 Permalink
Great job here on _______ I
Great job here on _______ I read a lot of blog posts, but I never heard a topic like this. I Love this topic you made about the blogger's bucket list. Very resourceful. Buy magic mushrooms
Submitted by ZoneZone on Wed, 03/10/2021 - 08:42 Permalink
Wonderful blog! Do you have
Wonderful blog! Do you have any tips and hints for aspiring writers? Because I’m going to start my website soon, but I’m a little lost on everything. Many thanks! 먹튀폴리스
Submitted by ZoneZone on Wed, 03/10/2021 - 14:16 Permalink
Excellent to be visiting your
Excellent to be visiting your blog again, it has been months for me. Rightly, this article that I've been served for therefore long. I want this article to finish my assignment within the faculty, and it has the same topic together with your article. Thanks for the ton of valuable help, nice share. video defensive driving
Submitted by ZoneZone on Wed, 03/10/2021 - 14:22 Permalink
Thank you so much as you have
Thank you so much as you have been willing to share information with us. We will forever admire all you have done here because you have made my work as easy as ABC. rodeo belt buckles
Submitted by ZoneZone on Wed, 03/10/2021 - 14:28 Permalink
That is the excellent mindset
That is the excellent mindset, nonetheless is just not help to make every sence whatsoever preaching about that mather. Virtually any method many thanks in addition to i had endeavor to promote your own article in to delicius nevertheless it is apparently a dilemma using your information sites can you please recheck the idea. thanks once more. deck installation austin tx
Submitted by ZoneZone on Wed, 03/10/2021 - 14:34 Permalink
Thanks for sharing this
Thanks for sharing this information. I really like your blog post very much. You have really shared a informative and interesting blog post with people.. shipping container sales
Submitted by ZoneZone on Wed, 03/10/2021 - 14:39 Permalink
Outstanding article! I want
Outstanding article! I want people to know just how good this information is in your article. Your views are much like my own concerning this subject. I will visit daily your blog because I know. It may be very beneficial for me. acheter des vues youtube
Submitted by ZoneZone on Wed, 03/10/2021 - 14:45 Permalink
Excellent to be visiting your
Excellent to be visiting your blog again, it has been months for me. Rightly, this article that I've been served for therefore long. I want this article to finish my assignment within the faculty, and it has the same topic together with your article. Thanks for the ton of valuable help, nice share. leadership coach
Submitted by ZoneZone on Wed, 03/10/2021 - 14:51 Permalink
I have been impressed after
I have been impressed after read this because of some quality work and informative thoughts. I just want to say thanks for the writer and wish you all the best for coming! Your exuberance is refreshing. deck builder austin tx
Submitted by ZoneZone on Wed, 03/10/2021 - 14:56 Permalink
I am incapable of reading
I am incapable of reading articles online very often, but I’m happy I did today. It is very well written, and your points are well-expressed. I request you warmly, please, don’t ever stop writing. cyber security for small businesses
Submitted by harrisandreson on Wed, 03/17/2021 - 00:35 Permalink
Now computer languages are
Now computer languages are also associated with this technology we call it Artificial intelligence that will change our lives, of course, I will write about it in details but currently, I'm writing something about airport security essay because this topic has not been discussed by many of the online experts and writers, if you want to know how it will work, come and join me.
Submitted by ZooneZoone on Thu, 03/25/2021 - 15:55 Permalink
I know this is one of the
I know this is one of the most meaningful information for me. And I'm animated reading your article. But should remark on some general things, the website style is perfect; the articles are great. Thanks for the ton of tangible and attainable help. Escorts in Lahore
Submitted by ZooneZoone on Thu, 03/25/2021 - 16:04 Permalink
Excellent post. I was
Excellent post. I was reviewing this blog continuously, and I am impressed! Extremely helpful information especially this page. Thank you and good luck. Escorts in Islamabad
Submitted by ZooneZoone on Thu, 03/25/2021 - 16:16 Permalink
Really I enjoy your site with
Really I enjoy your site with effective and useful information. It is included very nice post with a lot of our resources.thanks for share. i enjoy this post. Escorts in Karachi
Submitted by ZooneZoone on Thu, 03/25/2021 - 16:19 Permalink
You have done a great job on
You have done a great job on this article. It’s very readable and highly intelligent. You have even managed to make it understandable and easy to read. You have some real writing talent. Thank you. Lahore escorts
Submitted by ZooneZoone on Thu, 03/25/2021 - 16:21 Permalink
You made such an interesting
You made such an interesting piece to read, giving every subject enlightenment for us to gain knowledge. Thanks for sharing the such information with us to read this... Karachi Escorts
Submitted by ZooneZoone on Thu, 03/25/2021 - 16:24 Permalink
Wow, cool post. I’d like to
Wow, cool post. I’d like to write like this too – taking time and real hard work to make a great article… but I put things off too much and never seem to get started. Thanks though. Islamabad Escorts
Submitted by ZooneZoone on Sun, 04/11/2021 - 09:37 Permalink
Great job here on _______ I
Great job here on _______ I read a lot of blog posts, but I never heard a topic like this. I Love this topic you made about the blogger's bucket list. Very resourceful. İndirim kodu
Submitted by ZooneZoone on Sun, 04/11/2021 - 11:44 Permalink
All the requirements of men
All the requirements of men are successfully fullled with us with the interactive process of New York Asian escort service oerings. We are here to meet the required intentions of men. We have the ability to dene and satisfy the needs of men. Our all-time goal is to fulll thedesired preferences of men. All the goals for sensual pleasure are perfectly dened here with us. We always render the quality services as per the bookings doneby the client. NYC Escort Outcall Service
Submitted by ZooneZoone on Mon, 04/12/2021 - 16:25 Permalink
Hi there! Nice material, do
Hi there! Nice material, do keep me posted when you post something like this again! I will visit this blog leaps and bounds for more quality posts like it. Thanks... International school
Submitted by ZooneZoone on Mon, 04/12/2021 - 16:32 Permalink
You understand your projects
You understand your projects stand out of the crowd. There is something unique about them. It seems to me all of them are brilliant. Dr Gőz Péter válóperes ügyvéd Debrecen
Submitted by ZooneZoone on Tue, 04/13/2021 - 15:57 Permalink
Wow, cool post. I’d like to
Wow, cool post. I’d like to write like this too – taking time and real hard work to make a great article… but I put things off too much and never seem to get started. Thanks though. FRUITY PEBBLES STRAIN
Submitted by ZooneZoone on Tue, 04/13/2021 - 16:06 Permalink
Attractive, post. I just
Attractive, post. I just stumbled upon your weblog and wanted to say that I have liked browsing your blog posts. After all, I will surely subscribe to your feed, and I hope you will write again soon! Illuminati members
Submitted by ZooneZoone on Tue, 04/13/2021 - 16:11 Permalink
Positive site, where did u
Positive site, where did u come up with the information on this posting? I'm pleased I discovered it though, ill be checking back soon to find out what additional posts you include. cargo charter
Submitted by ZooneZoone on Tue, 04/13/2021 - 16:15 Permalink
Pretty nice post. I just
Pretty nice post. I just stumbled upon your weblog and wanted to say that I have really enjoyed browsing your blog posts. After all I’ll be subscribing to your feed and I hope you write again soon! Medical marijuana
Submitted by ZooneZoone on Tue, 04/13/2021 - 16:20 Permalink
Excellent to be visiting your
Excellent to be visiting your blog again, it has been months for me. Rightly, this article that I've been served for therefore long. I want this article to finish my assignment within the faculty, and it has the same topic together with your article. Thanks for the ton of valuable help, nice share. buy firearms online
Submitted by ZooneZoone on Tue, 04/13/2021 - 16:25 Permalink
This is my first time i visit
This is my first time i visit here. I found so many interesting stuff in your blog especially its discussion. From the tons of comments on your articles, I guess I am not the only one having all the enjoyment here keep up the good work cars for sale by owner
Submitted by ZooneZoone on Tue, 04/13/2021 - 16:30 Permalink
It is a fantastic post –
It is a fantastic post – immense clear and easy to understand. I am also holding out for the sharks too that made me laugh. bike for sale
Submitted by ZooneZoone on Tue, 04/13/2021 - 16:35 Permalink
Thanks a lot for sharing this
Thanks a lot for sharing this excellent info! I am looking forward to seeing more posts by you as soon as possible! I have judged that you do not compromise on quality. buy firearms online
Submitted by ZooneZoone on Tue, 04/13/2021 - 16:40 Permalink
Wow, cool post. I’d like to
Wow, cool post. I’d like to write like this too – taking time and real hard work to make a great article… but I put things off too much and never seem to get started. Thanks though. best firearms
Submitted by ZooneZoone on Tue, 04/13/2021 - 16:46 Permalink
Pretty nice post. I just
Pretty nice post. I just stumbled upon your weblog and wanted to say that I have really enjoyed browsing your blog posts. After all I’ll be subscribing to your feed and I hope you write again soon! Medical marijuana
Submitted by ZooneZoone on Tue, 04/13/2021 - 16:51 Permalink
Whenever I have some free
Whenever I have some free time, I visit blogs to get some useful info. Today, I found your blog with the help of Google. Believe me; I found it one of the most informative blog. Penis envy dosage
Submitted by ZooneZoone on Tue, 04/13/2021 - 16:56 Permalink
Great content material and
Great content material and great layout. Your website deserves all of the positive feedback it’s been getting. Legit cannabis online
Submitted by ZooneZoone on Tue, 04/13/2021 - 17:02 Permalink
Your blog has piqued a lot of
Your blog has piqued a lot of real interest. I can see why since you have done such a good job of making it interesting. I appreciate your efforts very much. best firearms
Submitted by ZooneZoone on Tue, 04/13/2021 - 17:08 Permalink
Excellent post. I was always
Excellent post. I was always checking this blog, and I’m impressed! Extremely useful info specially the last part, I care for such information a lot. I was exploring this particular info for a long time. Thanks to this blog my exploration has ended. Illuminati members
Pages